An intelligent tracking car was designed, and the whole system was introduced. The STC12C5A60S2 MCU is the intelligent car control core, power module, motor drive circuit, tracking sensor module and corresponding software design. The infrared reflection sensor TCRT5000 detects the road surface information, and the internal program of the MCU controls the L298N full-bridge driver chip combined with the PWM signal output by the single-chip microcomputer to control the movement speed of the left and right wheel motors of the trolley, so that the trolley can automatically travel along the guiding trajectory to realize the automatic car. The purpose of tracking. The test results show that the whole system has a simple circuit structure and high reliability, and realizes the expected intelligent tracking car function.
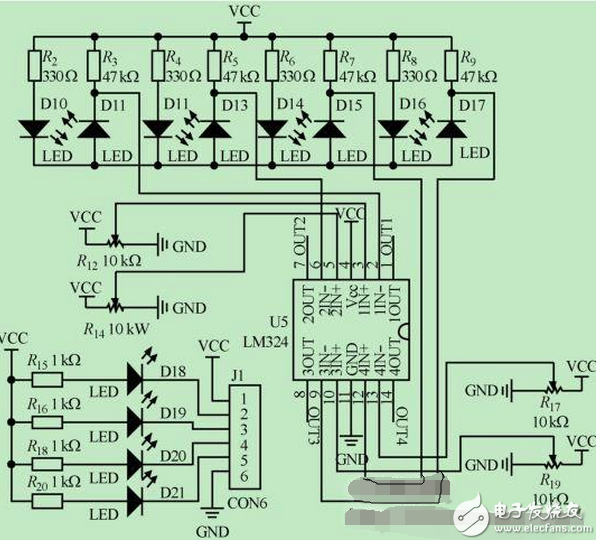
Tracking sensor module circuit schematic:
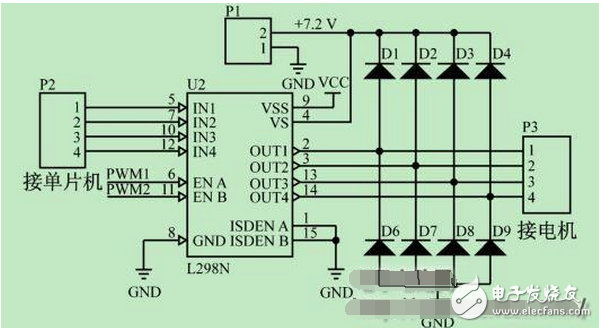
Motor drive module schematic:
Terminal Wires,Black Tinned Copper Terminal Wires,Bare Copper Terminal Wires,Tinned Copper Terminal Wires
Dongguan ZhiChuangXing Electronics Co., LTD , https://www.zcxelectronics.com